
Der Farbsensor des Lego Roboters kann auf verschiedene Arten Sachen erkennen:
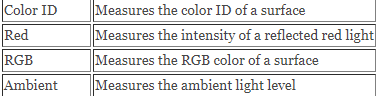
Der Ambient-Mode hatte bei meinen Tests die höhste Erfolgsquote bei meinem Test bei gleichbleibender Lichtstärke. Allerdings konnte es passiere, dass durch die Bewegung des Lichtsensors das Licht zu niedrig wurde und auch weiße Stellen zu dunkel waren und dadurch von meinem Programm als schwarz erkannt wurden. Deswegen entschloss ich mich für den nicht so konstanten RGB-Mode. Um die Erfolgsquote zu erhöhen programmierte ich eine while-Schleife, die sobald der Farbsensor das Feld erreicht hat, den Farbsensor einmal quer über Feld fahren lässt. Sobald er auf dieser kurzen Strecke Schwarz erkennt wird dieses notiert. Allerdings erkennt der Roboter immer noch nicht zu 100 Prozent die Farbe. Was dazu führte, dass ich das schwarze Feld immer ca. einen 1 cm breit malte.