
Nachdem ich mit dem Programmieren angefangen habe, haben wir uns als Gruppe getrennt und dann habe ich alleine an dem Projekt weiter gearbeitet. Es gab dann nicht mehr so viele Aufgaben zu verteilen. Leider blieben aber die Probleme nicht aus…
Das erste Problem was es zu lösen gab war die Kamera. Um eine vernünftig funktionierende KI zu bauen benötigt man ein Programm, dass das Spielfeld auch richtig erkennt. Dafür kann man auch eine KI programmieren. Jedoch braucht diese, wie ich festgestellt habe, ein viel zu großes Datenpaket an Referenzbildern mit verschiedenen Lichtverhältnissen, etc. um das Feld zu erkennen. Aus diesem Grund habe ich den Plan geändert. Der neue Plan ist eine App fürs Handy zu programmieren, an der man die Eingaben macht und einen kleinen Server einzubauen, auf den dann die App und der Roboter zugreifen können.
Das jedoch war nicht das einzige Problem… Das nächste Problem war es, dass bei ersten Tests der Roboter das Blatt nicht richtig eingezogen bekommen hat. Das lag daran, dass die Reifen nicht die richtige Höhe hatten und das Blatt deswegen nicht ganz festgehalten wurde. Aus diesem Grund musste ich den Roboter dann noch einmal komplett umbauen.
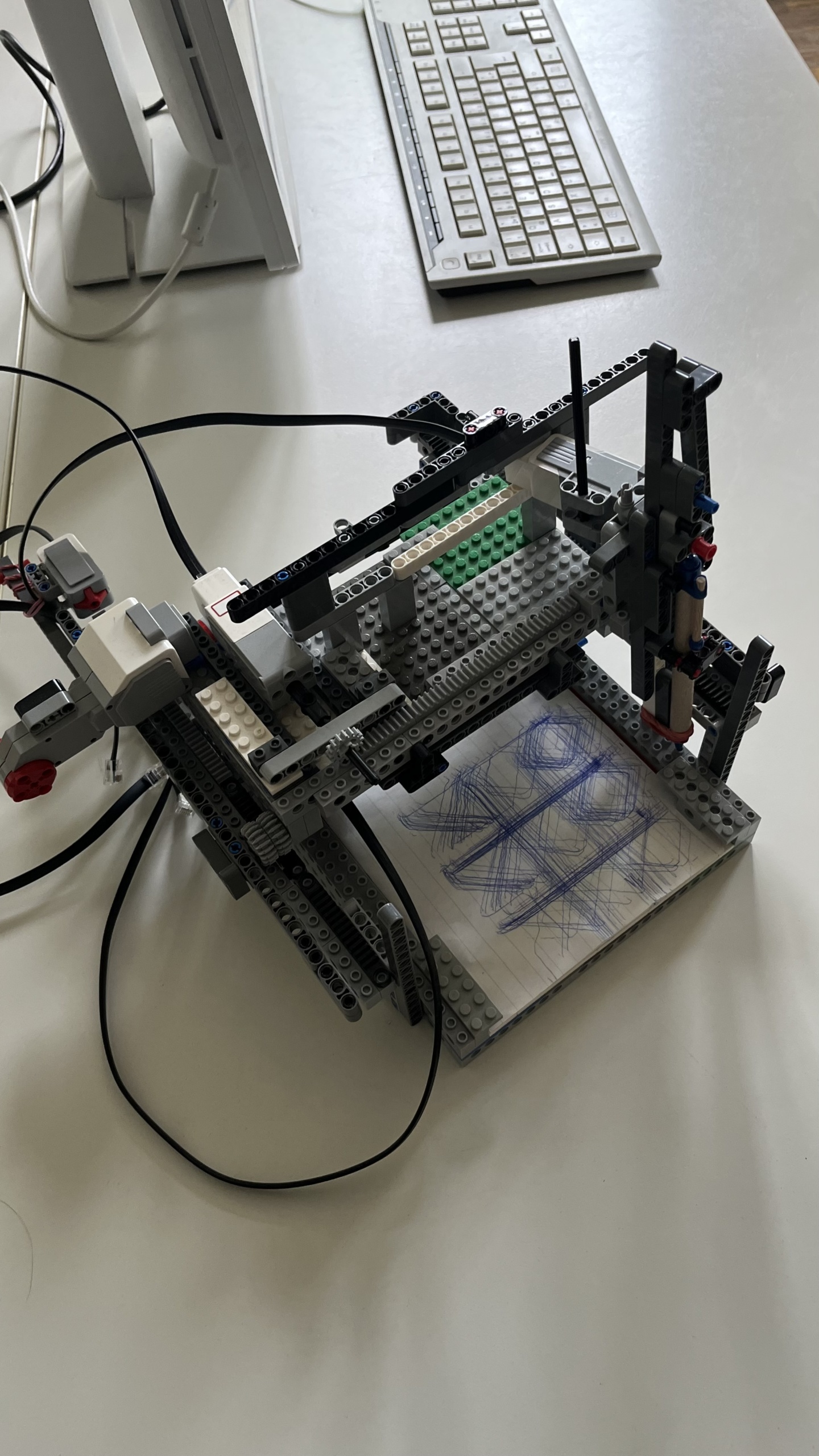
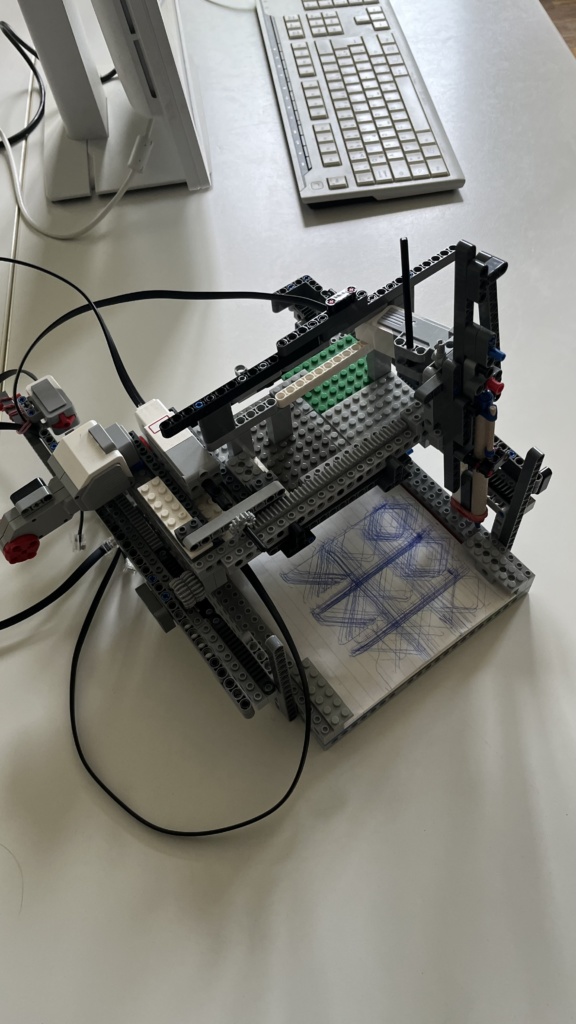
Nach dem Umbau sah der Roboter dann so aus und funktioniert nun ganz anders. Mittlerweile ist das Blatt fest an den Roboter geklebt und der Stift fährt die drei Achsen ab. Ein Motor unter der Plattform bewegt den Stift nach vorne und hinten mit samt der oberen Plattform. Der kleine Motor links auf der Plattform bewegt dann den Stift samt Halterung zur Seite. Der letzte kleinere Motor auf dem Bild gerade rechts bewegt den Stift dann nach oben und unten und sorgt dafür dass der Stift schreibt oder auch nicht. Der Letzte große Motor auf dem Bild ganz links wird nur als Gewicht benutzt und hat keinen weiteren Zweck. Außerdem habe ich jetzt ein Knopf verbaut, mit dem ich die Position der Plattform die nach vorne und hinten fährt bestimmen kann. Nach einigen Tests funktioniert jetzt alles und jetzt kann ich wirklich anfangen zu Programmieren.