
Für mein gewähltes Projekt war die interne Landkarte besonders wichtig. Um eine grobes Verständnis zu geben muss man sagen, dass es verschiedene Verwendungen für die Karte gibt. Diese unterscheiden sich durch „relative_to_robot=True“ oder „False“. Der Unterschied zwischen den beiden Varianten ist das Cozmo bei „True“ jedes mal bei den Koordinaten 0,0,0 startet, wohingegen er bei „False“ an dem Punkt wieder startet an dem er die letzte Methode beendet hat. Dieser Punkt wird erst zurück gesetzt, wenn man Cozmo hochhebt und ihn neu auf den Boden setzt, so befindet er sich wieder bei den Koordinate 0,0,0. Beide Varianten haben natürlich ihre Vorzüge in bestimmten Anwendungssituationen, da einige Methode gar nicht darauf ausgelegt sind mehrfach zu laufen.
Die Landkarte lässt sich insofern verwenden, dass man dem Roboter einen Punkt geben kann zu dem er dann hinfährt. Außerdem kann man Objekt in die Karte setzten denen Cozmo dann ausweicht. Durch diese Möglichkeit kann man eine ganze Landkarte mit Straßen erstellen, durch die Cozmo dann ohne Unfälle zu dem gegebenen Punkt hindurch fährt.
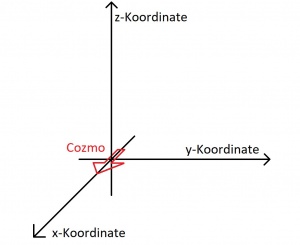
Der Aufbau der Koordinaten ist ziemlich ungewohnt wenn an das Koordinatensystem aus der Mathematik denkt da die Achsen anders ausgerichtet sind.
Ein Faktor der am Anfang zu einigen Problemen geführt hat, ist die Position von Cozmo selbst. Dieser weiß wie Groß er ist und überprüft so sofort, ob es möglich ist das Ziel zu erreichen, wodurch er bei einem kleinen Fehler nicht losfährt.