<
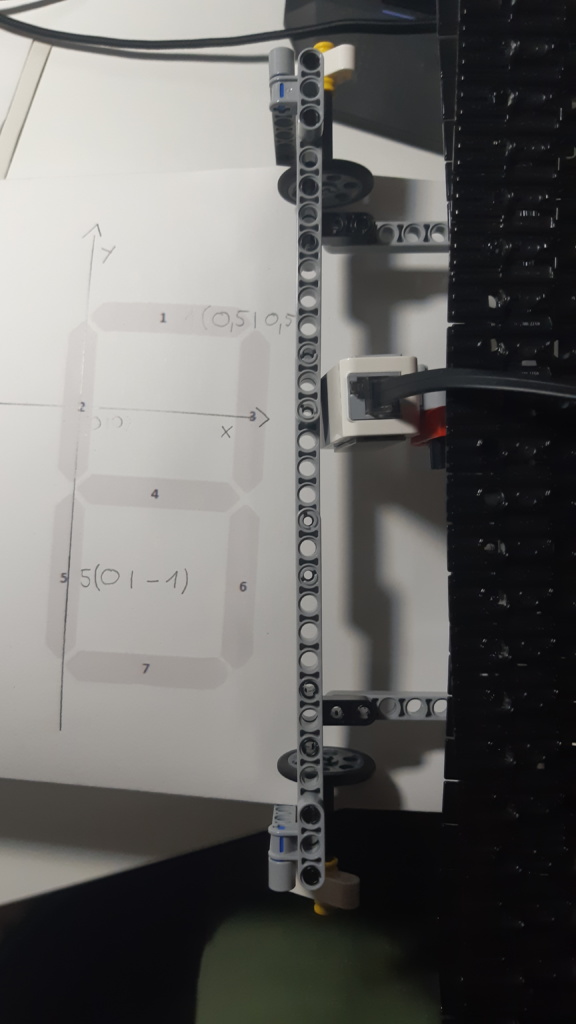
<Der Farbsensor der später der die einzelnen Felder erkennen soll muss diese natürlich erst einmal erreichen. Dazu nutze ich zwei Motoren die eine X-Achse und eine Y-Achse darstellen. Der eine Motor bewegt Räder auf denen das Papier aufliegt und der andere Motor bewegt die Kette an der der Farbsensor befestigt ist. Als (0/0) Punkt für das Koordinatensystem wählte ich das Feld 2 da es auch der Startpunkt ist. Wenn sich der Farbsensor nun vom Feld 1 zum Feld 5 bewegen soll subtrahiert er die Koordinaten von Feld 5 von Feld 1 und hat somit den Richtungsvektor zwischen den beiden Punkten der nun an die Motoren weitergeben wird. Der Roboter arbeitet somit die einzelnen Felder nacheinander ab.