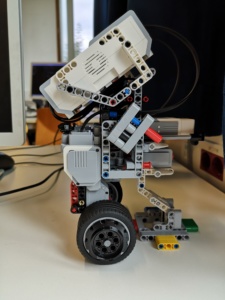
 Zu Beginn des Robotikkurses hat sich jeder Gedanken gemacht, mit welcherm Problem/Roboter er oder sie sich beschäftigen will. Ich habe mich dafür entschieden, einen Lego EV3 Roboter zu bauen und zu programmieren, der auf zwei Rädern die Balance halten soll ohne hinzufallen. Das lässt sich besser vorstellen, wenn ihr auf den Link HIER klickt. Im Internet gibt es dazu eine Anleitung bezüglich des Roboters aus dem Video und für einen Roboter, der von Lego als Basis-Modell zur Verfügung gestellt wird HIER klicken. Um den Roboter zu programmieren, haben wir im Projektkurs eine API für Java namens Lejos. API steht dabei für die Schnittstelle zwischen dem Lego EV3 Roboter und Java. Damit bekommen wir die Möglichkeit, auf die Befehle des Roboters in Java zuzugreifen. So können wir ihn schlussendlich in Java programmieren, z.B. dass der Roboter seine Sensoren nutzen soll. Wie soll sich der Lego Roboter aufrecht halten? Das Prinzip, welches ich nutzen werde, versucht den Roboter aufrecht zu halten, ist kompliziert. Im Laufe des Projektes musste ich dies wiederholt anpassen, da immer wieder Fehler auftraten. Die Programme basieren darauf, dass der Gyrosensor/Lagesensor des Roboters, der zwei Werte überprüfen kann: die Geschwindigkeit mit der sich der Winkel verändert und den Winkel im Verhältnis zum kalibriertem Winkel, mehr dazu später.
Zu Beginn des Robotikkurses hat sich jeder Gedanken gemacht, mit welcherm Problem/Roboter er oder sie sich beschäftigen will. Ich habe mich dafür entschieden, einen Lego EV3 Roboter zu bauen und zu programmieren, der auf zwei Rädern die Balance halten soll ohne hinzufallen. Das lässt sich besser vorstellen, wenn ihr auf den Link HIER klickt. Im Internet gibt es dazu eine Anleitung bezüglich des Roboters aus dem Video und für einen Roboter, der von Lego als Basis-Modell zur Verfügung gestellt wird HIER klicken. Um den Roboter zu programmieren, haben wir im Projektkurs eine API für Java namens Lejos. API steht dabei für die Schnittstelle zwischen dem Lego EV3 Roboter und Java. Damit bekommen wir die Möglichkeit, auf die Befehle des Roboters in Java zuzugreifen. So können wir ihn schlussendlich in Java programmieren, z.B. dass der Roboter seine Sensoren nutzen soll. Wie soll sich der Lego Roboter aufrecht halten? Das Prinzip, welches ich nutzen werde, versucht den Roboter aufrecht zu halten, ist kompliziert. Im Laufe des Projektes musste ich dies wiederholt anpassen, da immer wieder Fehler auftraten. Die Programme basieren darauf, dass der Gyrosensor/Lagesensor des Roboters, der zwei Werte überprüfen kann: die Geschwindigkeit mit der sich der Winkel verändert und den Winkel im Verhältnis zum kalibriertem Winkel, mehr dazu später.
