
So, da ich jetzt also auf mich gestellt war, begann ich zu überlegen, was meine Optionen waren.
Durch den fehlenden dritten (starken) Motor, konnte ich nur horizontale und vertikale Bewegungen durchführen. Von vorne nach hinten konnte ich also nix bewegen. Ich entschied mich dazu, dass der Roboter eine Mauer bauen soll, wenn man ihm die Steine an einen vorgegebenen Ort legt. Dafür ist nur die Bewegung in die Horizontale und die Vertikale von Nöten.
Ich habe dann begonnen meine alten Skizzen herauszusuchen und anhand derer den ersten Teil, den ,,Greifarm“, zu bauen.
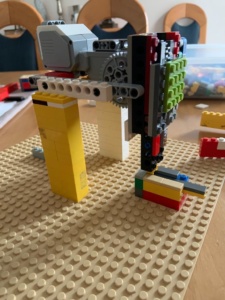
Hier sieht man die Konstruktion. Im Grunde ist es nur ein Motor an dem ein Zahnrad befestigt ist. Dieses kann, wenn es sich dreht, einen Balken hoch und runter bewegen, an dessen Ende ein Stein verbaut ist, an den sich an die Noppe eines sich darunter befindenden Steins locker anheftet. Die kleine Konstruktion unten ist eine Vorrichtung um eine Stein, der angehoben werden soll, an die richtige Position zu legen.
Jetzt wollte ich nicht nur die Steine anheben, sondern sie auch zur Seite bewegen können. Da mir immer noch keine Zahnstangen besaß, probierte ich andere Möglichkeiten. Eine davon war Reifen an den zweiten Motor zu befestigen, die auf einer Schiene oben drüber laufen sollten. Erstmal sah es auch ganz gut aus und ich konnte nun auch Steine an einer Stelle anheben und dann seitlich zu einer anderen fahren, jedoch war das ganze nicht präzise genug. Wenn ich den Roboter eine bestimmte Entfernung nach links schickte und danach dieselbe Strecke zurück nach rechts, kam der Roboter nicht am Ursprung an. Also musste eine neue Idee her.
Bald kam ich darauf die in dem Set enthaltene Kette zu benutzen und nach dem ich diese einbaute, sah die Konstruktion wie folgt aus:

Diese Version lief um einiges besser und präziser als alle anderen Ideen.