
Mein Projekt
Nachdem wir uns nun einige Zeit mit COZMO und Python beschäftigt hatten, wurde es Zeit sein eigenes Projekt zu entwickeln.
Um herauszufinden, mit welchen Fähigkeiten des Roboters sich ein Projekt starten lassen würde, habe ich mir auf der Website der Entwickler viele der vorhandenen Methoden angesehen.
Schnell hab ich Interesse an der internen Landkarte gefunden.
Meine Idee:
Mithilfe der internen Landkarte soll der Roboter seinen Weg durch eine Stadt finden.
Auch andere aus dem Kurs hatten Interesse daran mit der internen Landkarte zu arbeiten, weshalb wir uns mit Herr Eschweiler zusammen überlegt haben einen Spielteppich mit aufgemalten Straßen zu kaufen.
Aus Zeit- und Krankheitsgründen habe ich mich jedoch dafür entschieden nicht mit dem Teppich, sondern mit einem eigenen Stadtplan zu arbeiten.
Die Entwicklung des Stadtplans war jedoch etwas kniffliger als gedacht. Da COZMO mehr platz benötigt als er breit ist, galt es erstmal heraus zu finden wie eng ich die Straßen machen kann ohne, dass COZMO sich weigert durch zu fahren.
Nach einigem ausprobieren zusammen mit den anderen Schülern aus dem Projektkurs haben wir herausgefunden, dass COZMO eine Straßenbreite von mindestens 75mm benötigt.
Damit der Roboter etwas Spielraum hat haben ich die Straßen 100mm breit gemacht.
Den eigentlichen Straßenverlauf habe ich dann mit Hilfe von anderen Computerspielen entwickelt, da ich mir so eine bessere 3-dimensionale Übersicht verschaffen konnte.
Die entwickelte Struktur habe ich dann in ein Rastermuster übertragen und die Koordinaten berechnet.
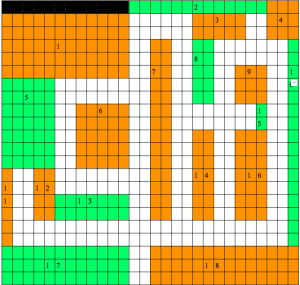
Die grünen und orangenen Kästen stellen Objekte da, auf die ich später noch eingehen werde.
Ein Kästchen = 50mm x 50mm, eine Koordinate = 1mm.
Nachdem ich den Stadtplan nach ca. einer Wochen vollständig entwickelt hatte, galt es diesen nun in Originalgröße auf eine Oberfläche zu übertragen. Dafür habe wir eine große Pappe im Informatikraum gefunden.
Während ich in den Robotikstunden an der Pappe gezeichnet habe, habe ich zuhause angefangen mich darum zu kümmern, dass der Roboter nicht die Luftlinie wählt, wenn ich ihn von einer Koordinate zur nächsten schicken, sondern dem Straßenverlauf folgt.
Dafür musste ich sogenannte ,,custome_objects” programmieren.
,,custome_objects” sind virtuelle Objekte, die man dem Roboter in den Weg stellen kann, damit dieser an der Stelle nicht weiterfahren kann.
Als dann endlich der Stadtplan auf der Pappe war und alle Objekte so programmiert waren, dass sich zwischen diesen das Straßennetz befindet, habe ich verschiedenen Koordinatenpunkten Namen gegeben, damit ich COZMO später leichter an die vorgegebenen Punkte schicken kann.
Als ich die ersten Testläufe gestartet habe, ist der Roboter jedoch gegen meine Erwartung quer über die Pappe gefahren. Nach einigem Herumprobieren und absprachen mit den Mitschülern habe ich den Fehler gefunden: beim erstellen der virtuellen Objekte habe ich nur 2 Koordinaten pro Eckpunkt angegeben und dabei die höhe vergessen, also auf 0 gesetzt.
Nachdem auch dieser Fehler behoben ist, läuft das Projekt hoffentlich nun ohne Probleme.
Leider konnte ich das Programm nicht noch einmal ausprobieren, da die letzten Stunden ausgefallen sind und ich den Roboter zur Zeit nicht zuhause habe.